EVO LOGICS自动水文测量车SONOBOT 5
- 品 牌:EVO LOGICS
- 型 号:SONOBOT 5
-
技术资料:
 EVO LOGICS自动水文测量车SONOBOT 5.pdf
EVO LOGICS自动水文测量车SONOBOT 5.pdf
- 阅读次数:1364
产品介绍
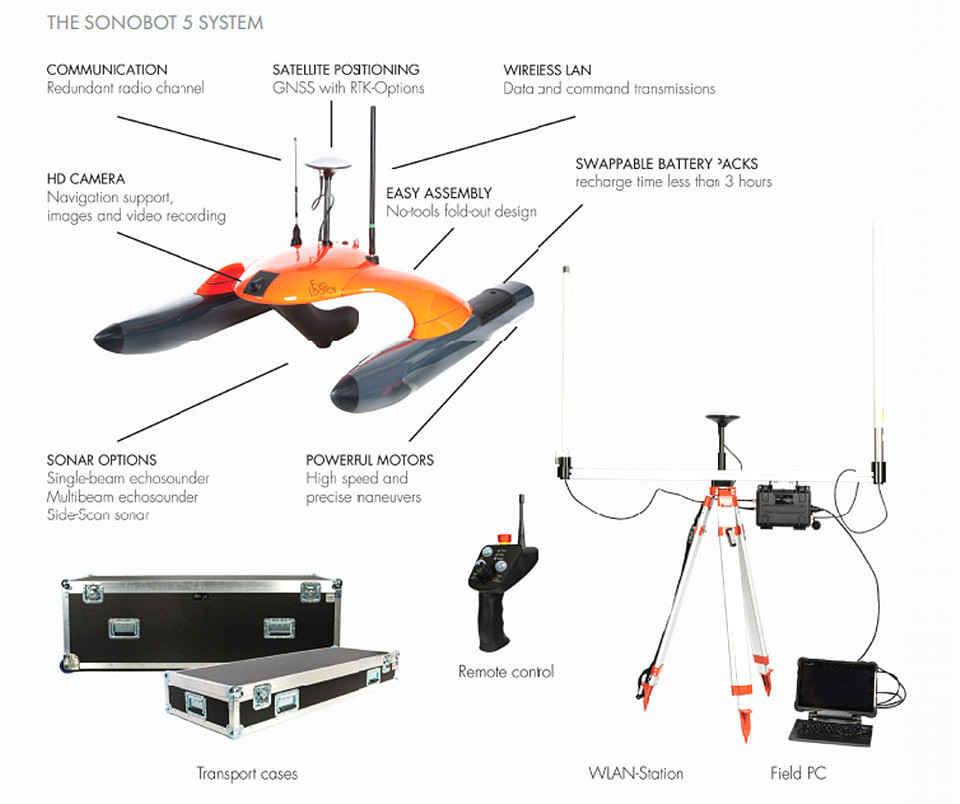
Sonobot 无人水面车辆是一个系统平台,专为满足内陆水域水文测量的需求而设计。它以高精度执行经典的测深和侧扫声纳成像。Sonobot 是一种非常轻便的模块化测量系统,可以灵活地适应特定应用的需求。
性能特点
- 高精度测量和记录
提供不同的 GNSS 选项(带/不带 RTK 的 DGPS,以及全站仪上的激光跟踪)
声纳:单波束测深仪、多波束回声测深仪、侧扫声纳(根据客户需求进行可变配置)
用于导航支持、照片和视频录制的高清摄像头
- 灵活性
快速系统部署、机动性和区域覆盖得益于强大而有效率的驱动器
用于规划、执行和评估调查的专用系统软件
通过冗余网状网络进行通信,可以在有/没有 WLAN 站的情况下工作,包括无需任何配置工作即可集成其他模块(激光跟踪)
- 多功能性
自主和无线电控制的操作模式
通过冗余链路或 GPRS/UMTS 直接进行 Wi-Fi 通信
任务规划包括声纳参数设置
可配置的数据输出
- 坚固性
由耐海水的坚固材料制成(玄武岩层压板、不锈钢、塑料)
适用于工业废水中的操作
用于现场操作的 PC
板载数据记录,按需无线传输
运输箱,适合空运
- 易于处理
完全无需工具组装
可单人处理
可放入汽车后备箱进行运输
产品结构与细节
技术参数
车辆类型:双体船
重量:< 27 公斤
运输:完整系统在一个运输箱中,折叠式无工具组件
IP 等级:IP 68 适用于所有系统组件
系统组件:Sonobot USV、带软件的现场 PC、遥控器、带三脚架和天线的 WLAN 站
操作
通信:网状网络 2.4 GHz WiFi 和 868 MHz 冗余(915 MHz 可用)实现控制
实时导航和测量数据采集
WLAN 范围:max.1.5 公里(使用全向天线),max.2.5 公里(使用定向天线)
工作范围:>30 km,水中 1 m/s 速度
测量速度:0.5 至 1.5 m/s,max.速度 5 m/s
工作时间:使用一个电池组长达 9 小时,可提供额外的电池组
风/浪:高达 5 Bft 而不会破坏波浪
控制:手动控制和基于地图的导航、用于自主操作的自动驾驶仪、无线电静音模式
声纳
回声测深仪:EvoLogics 宽带单波束回声测深仪 200 kHz - 标准;提供 80 kHz 和 400 kHz 选项
侧扫描声呐:EvoLogics 700 kHz,带集成 1MHz 回声测深仪 - 标准;
提供 300 kHz 和 1.2 MHz 侧扫声纳选项
多波束测深仪:IMAGENEX 270 kHz
定位
GNSS:集成 OEM 板、适用于所有全球卫星系统的 DGPS 以及具有大量通道和高精度可用
RTK:GSM/LTE 或 Base/Rover、EGNOS 上的参考服务
总站 :镜面反射器和全站仪,用于不带 GNSS 的定位可选
现场PC/软件
平板电脑:坚固、明亮、电池寿命长,带有预配置软件
软件:软件和 GUI 专为与 Sonobot 一起工作而设计,也可在没有 PC 的情况下使用
相机
前视摄像头:完全集成的 HDTV 网络摄像头,带有用于照片和视频录制的数据存储。
提供水下相机选项
运输
外壳:长期工业使用的坚固外壳
外壳尺寸:1532 x 585 x 514 毫米
总系统重量:60 公斤
产品尺寸
高度:805 毫米(结构)
宽度:920 毫米
长度:1300 毫米
DRAFT:120 毫米(龙骨线上的螺旋桨)带杂草防护装置






 津公网安备12010102000945号
津公网安备12010102000945号